
1.1中心介绍
中心由航天领域著名专家哈工大崔乃刚教授担任首席科学家。其中学术顾问专家包括工程院院士两名,核心成员中教师/博士/硕士、全职技术人员50余人,其中核心教师7名。
近几年承担国家级、国防项目30余项。团队获国家级科技进步二等奖一项,国家级科技发明二等奖一项、省部级科技进步一、二、三等奖十五项。中心以自主可控为核心,基于国产自研机器人操作系统、人形机器人操作系统、高精度工业控制器、人形机器人“大小脑”控制器及面向智能制造工业机器人、模块化协作人形机器人等整机产品,主要解决了机器人基础软件平台技术的自主可控与国产化替代问题,提升了机器人的性能与智能化水平,推动了智能制造与多机器人协作的发展,并拓展了机器人在工业、教育、国防、服务等领域的应用场景。
1.2中心负责人

曲明成
博士、副教授、博士生导师
国家重大科技攻关哈工大科研总体组副组长、工信部产业链协同创新项目软件总师、工信部重大项目牵头单位项目执行负责人,国家重点研发计划课题负责人。
主持973项目专题课题、国家自然科学基金、中国博士后科学基金特别资助等多项基础研究类课题,作为主要人员参与国家921载人航天、863计划项目、总装预研、省部委科研项目10余项。在国内外学术刊物及会议上发表和已录用论文50余篇(主要涉及分布式大数据服务、云计算、自动化软件工程),其中SCI/EI/CPCI检索30余篇,近两年单篇论文下载次数近3000次。主编本科教材两部《IT项目管理》,《ROS2源代码分析与工程应用》。获得黑龙江省自然科学术成果二等奖一项,哈尔滨自然科学技术成果三等奖一项,江苏省软件金慧奖一等奖一项。获载人航天软件工程化最佳论文二等奖一项。申请/获发明专利及软件著作权40余项。International Journal on Software Engineering and Knowledge Engineering(SCI期刊)、电子学报(一级期刊)、哈工程大学学报等学术期刊特约审稿人。
代表性项目:
机器人智能操作系统
(1)工信部重大项目牵头单位负责人,项目执行负责人,打造国产嵌入式操作系统,项目总投资2.5亿。联合深开鸿、东土科技、埃夫特、江苏汇博、思灵机器人、拓斯达等。
(2)工信部国家重点产业链创新项目(2.7亿总经费) 软件总师,与华为鸿蒙、广州数控、东土科技等联合研制国产化嵌入式操作系统。
(3)国家科学计算与系统建模仿真重大科技攻关项目,机器人仿真平台负责人。
(4)国家重点研发计划课题——机器人智能操作系统,课题负责人。
具身智能技术
(5)国家应急部、工信部、科技部揭榜挂帅项目,防汛成套无人装备-四足仿生机器狗,软件总师。
(6)工信部揭榜挂帅——人形机器人智能控制(动力学、基于强化学习的智能控制),参研单位负责人。
(7)特种无人机系统——国家级基础加强项目,融合人工智能技术的智能控制,项目负责人。
(8)传感型全尺寸人形机器人——省部级重大专项,小脑智能控制负责人。
工业软件
(9)研制焦化数字孪生平台——黑龙江重点研发计划,课题负责人。
崔乃刚
技术首席、教授、博导
我国国防领域专家,哈工大航天学院航天工程系主任,航空宇航科学与技术学科教授、博士生导师。曾获国家级科技进步二等奖一项,省部级科技进步一、二、三等奖十余项,国家教学成果二等奖一项,省级教学成果二等奖三项。承担各类国防军队项目、课题、型号任务100余项,近几年年度科研经费到款8000余万。航天领域资深专家,黑龙江省航空学会副理事长,中国宇航学会导弹及航天运载专业委员、空气动力学与飞行力学专业委员会和飞行器任务规划委员会委员;《航空学报》、《宇航学报》、《弹道学报》、《哈工大学报》等期刊编委。教育部国防专业教学指导委员会委员、哈工大教学带头人、哈工大教学名师。
2.中心研究方向
团队核心成员具备计算机、控制交叉学科背景。多年来在操作系统、人形机器人、人工智能与计算机视觉、机器人群体规划控制,科学计算与建模仿真等方向积累了丰硕的科研成果和产业化技术、产品。通过技术融合创新并结合重庆市重点产业方向布局如下:
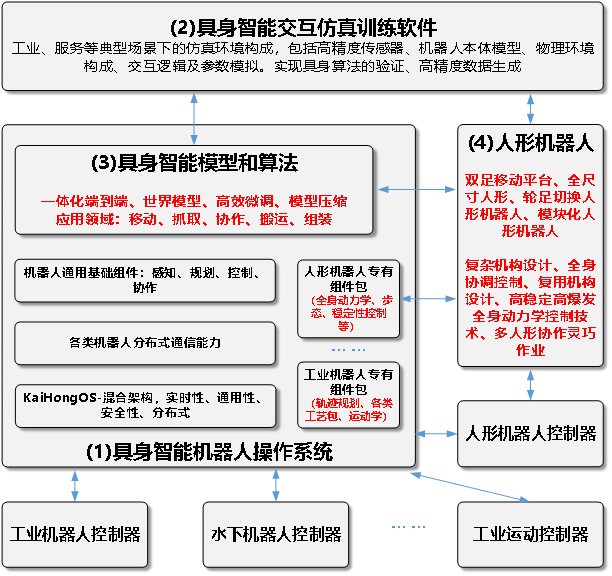
2.1研究方向--全国产机器人操作系统及控制器
基于国产操作系统,构建适用于工业等场景的机器人实时操作系统及其集成开发环境。该软件系统涵盖内核层、中间层、组件层与应用层。着重研发具备模块化特性、实时性能卓越的智能架构,以实现对不同硬件平台的良好兼容以及分布式协同作业。采用感知、决策、控制一体化设计理念,将各功能模块深度融合,提升系统整体效能。同时,高度重视系统的安全可靠性,通过多重防护机制和冗余设计,确保机器人在复杂工业环境中稳定、安全运行。
2.2研究方向--人形机器人
在机械结构方面,探索刚- 柔耦合人形机器人腿 - 足一体化机构设计,提升机器人运动灵活性与适应性;研发轮 - 足复合人形机器人关节功能复用技术,增强机器人多功能运动能力。在控制技术上,攻克人形机器人多点接触场景下的全身协调控制技术,保障运动稳定性;研究复杂地形环境高速、高稳定性运动控制技术,提升机器人环境通过性。同时,开展人体运动力学测试与数据挖掘技术。借助 DeepSeek 实现自然人机交互与任务理解,最终形成具身智能多机协同作业机器人系统。
2.3 研究方向—具身智能机器人仿真训练平台
对标英伟达Issac,基于国产化芯片研发人形机器人复杂环境仿真训练平台。深入实际场景,提取并抽象典型应用环境及传感器参数。基于参数从多维度对智能体机器人和环境进行数字化建模,构建逼真虚拟场景。同时,打造高质量具身数据集与丰富强化学习算法库,为训练提供数据与方法支撑。此外,建立物理- 虚拟模型参数映射,实现两者有效联动。打造自主可控的仿真训练平台,加速人形机器人在复杂环境下的训练,推动其高效应用。
2.4研究方向—具身智能
面向具身智能的自适应传感器需求,研发多模态感知以实现空间智能的感知技术、模型和算法。构建世界模型,通过AIGC生成符合物理规律的场景及具身任务,并通过高效微调推动具身空间大模型的任务迁移,采用感知——语言——动作框架,增强具身智能体与环境的交互能力,基于持续学习的方法,确保智能体在开放世界中的有效适应实现异构多机器人的高效协作,构建包含模拟与真实数据集的综合数据库,以支持多样化的实验与应用。
3. 中心产业方向
3.1产业方向——智慧制造领域
“技术驱动 + 场景落地 + 生态构建”三位一体战略布局。以全国产机器人操作系统为技术底座,打造自主可控的工业基础软件生态体系,驱动传统生产线向柔性化、智能化方向全面升级。聚焦人形机器人运动控制技术的突破性创新,深度拓展仓储物流、特种作业等典型应用场景,融合具身智能技术,催生“多机协同交互 + 自主智能决策”的新型服务模式,形成覆盖“硬件研发 + 软件赋能 + 服务增值”的全产业链闭环,为制造业的高效化、绿色化、智能化转型提供核心动力。
3.2产业方向—教育领域
基于KaiHongOS的国产多机器人智能协作教育生态。依托KaiHongOS系统研发国产多机器人智能协作操作系统,集成国产AI引擎(DeepSeek),实现自然交互、任务解析、动作生成、协同作业、类自然语言编程及情感识别等教育场景功能。构建“人形机器人 +”模块化课程体系,涵盖“基础拆装 - 复杂系统开发 - AI训练”三大梯度,覆盖K12基础教育、职业教育及高等教育全学段,培养跨学科、实战型的智能机器人技术人才。
3.3产业方向—服务业领域
医疗康养:基于高实时操作系统开发手术辅助机器人与精准送药机器人,结合人形具身智能技术,实现康复陪护、智能导诊等场景化服务,显著提升诊疗效率与患者体验。
智慧物流:运用分布式协同技术构建AGV仓储机器人集群,通过轮-足复合机器人突破“最后一公里”复杂配送瓶颈,实现物流全流程自动化与智能化管理。
商业服务:部署感知-决策一体化机器人,应用于零售导购、餐饮配送等场景,优化人力效率与服务响应速度,推动商业服务向精准化、高效化升级。
公共服务:研发多模态交互导服机器人,结合人体运动力学优化政务大厅、交通枢纽等公共空间的动线设计,提升服务便捷性与空间利用率,打造智慧化公共服务新标杆。
4. 战略伙伴
外部与深开鸿深度联合发展。团队拥有哈工大计算学部、机电学院、航天学院、交通学院的优势学科及机器人专业、物联网专业、软件工程专业、交通工程专业融合背景。以哈尔滨工业大学重庆研究院为平台,联合校内外资源实施科技成果转化和企业发展科技需求供给、攻关。
团队积累了大量战略联盟伙伴,包括广东汇博、建设工业、航天建设集团、中烟多个烟厂、惠州宏大、航天吉光、航天科威、中冶赛迪、长安汽车航天科工七院、航天科工二院、航天科技八院、深航院等。
